003021
有刷直流电机(高扭矩版)
无刷空心杯电机
步进电机
编码器
电路板
行星减速箱(高性能版)
行星减速箱
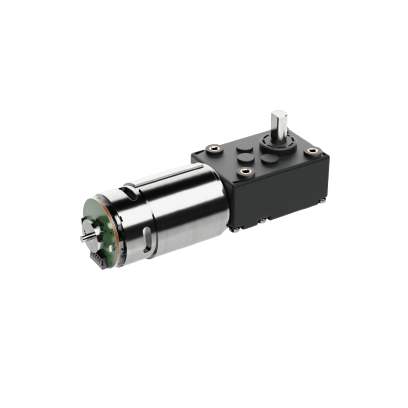
直角电机齿轮箱
汽车电子
智慧医疗
工业自动化
智能消费
机器人
研发实力
设计实力
智能制造
检测能力
企业动态
展会活动
行业资讯
常见问题
公司介绍
可持续发展
联系我们
根据矿用汽车变速器的设计要求和特点,在变速器可靠使用的条件下,建立实际使用功率优化模型,并运用MATLAB优化工具进行优化计算。对优化设计和原设计进行对比,从汽车的驱动力、后备功率、动力性指标等方面形象直观地显示各种优化效果,为变速器的改进设计提供一种备选方案。与原设计方案相比较,优化设计的优化效果较好。
2017-12-27
回差及刚度是RV(Rotate Vector)减速器重要性能指标,研发了一套回差及刚度测试系统。提出了固定输出端、输入端加载,测试输入端转角的测试方法,通过输入-输出转矩对应关系及输入-输出角度对应关系换算,对RV减速器数据进行处理。提出了RV减速器刚度曲线拟合分析模型,并以RV-40E-121型号减速器为对象进行了测试,得到了该减速器的刚度曲线,根据数据分析,得到了该减速器回差及刚度性能符合指标。结果表明,该测试系统是合理。
2017-12-25
在对连杆齿啮式脉动无级变速器驱动机构分析的基础上,建立了等效平面六连杆机构的封闭矢量方程;采用矩阵法构件了单相驱动机构中连杆、摇杆与啮合点到输入轴轴心连线的运动学数学模型;应用MATLAB程序仿真分析了3种调速方式、相数与偏心距对变速特性的影响,确定了主要调速方式和优选相数,证明了该变速器驱动机构具有变速比可变化范围大和脉动率小等特点,为完善该变速器的设计理论及工程实现提供了一定的借鉴。
2017-12-15
根据人体肩关节运动运动特性,提出了一种由气动人工肌肉(PMAs)驱动的解藕型并联肩关节。应用螺旋理论对三自由度并联机构进行了自由度分析。基于并联机构反解易求特性,建立了机构的运动学模型,并利用拉格朗日建立了机构的动力学模型。通过仿真控制试验,使用计算力矩法能较好控制三自由度并联机构的运动,同时也验证了动力学模型的正确性。
2017-12-12
提出了一种各向同性移动并联机器人。先对该机器人的运动学问题进行了分析,建立其位置、速度和加速度方程;然后以“库伦+黏性”摩擦模型为基础,推导出驱动滑块和球铰所受的摩擦力/力矩方程;在考虑摩擦的情况下,利用牛顿-欧拉法分别建立了驱动滑块、分支运动链和机器人动平台的动力学模型,揭示了分支驱动力和加在动平台上的外力之间的映射关系;
2017-11-20
精密平台是一种能够提供微位移的工作平台,柔性铰链作为驱动机构,在精密平台设计中应用。柔性铰链是决定平台性能的关键,柔性铰链的结构形式和尺寸参数影响着定位精度的低。设计了一种叠加支链形式的柔性铰链结构,推导了基于该柔性铰链的二维精密平台的工作刚度、耦合刚度、耦合系数、铰链应力等性能指标的解析公式,并采用了有限元软件对性能指标进行了验证。仿真表明,两者具有良好的一致性,为应用于精密平台的柔性铰链设计提供参考
2017-11-15
− 3 = 2
专注于研发、生产精密驱动系统,为客户提供智能驱动方案设计,零件的生产与组装的定制化服务
立即咨询 >
微型减速齿轮箱
微型减速电机
微型电控系统
企业简介
科研实力
新闻动态
展会动态
联系方式
sales@szzhaowei.net
粤ICP备11019966号 Copyright © 2023 深圳市FH至尊机电股份有限公司
粤ICP备11019966号Copyright 2023 深圳市FH至尊机电股份有限公司
在线咨询